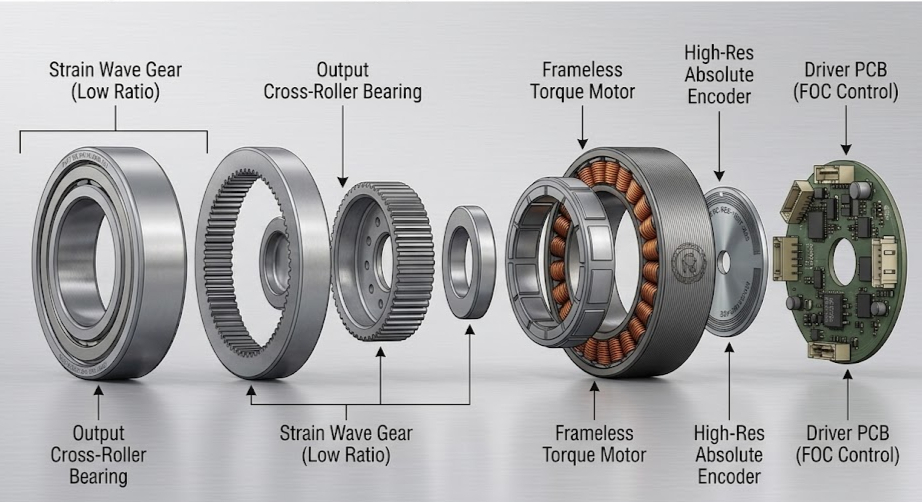
Standard industrial sensors frequently fail when pushed beyond their design limitations, causing critical downtime in automated guided vehicles (AGVs) and robots.
To ensure reliable position feedback, engineers must evaluate how different encoder architectures react to external variables, distinctly separating the sensing physics from the data output methodology.
Output Architecture: Absolute vs. Incremental
A common design error is conflating the physical sensing mechanism (optical, magnetic, inductive) with the signal output type (incremental vs. absolute).
The necessity for instant position data upon system power-up is solved by utilizing an absolute output architecture. Absolute encoders provide a unique digital code for every position, eradicating the need for a homing cycle, a critical safety requirement for heavy machinery that cannot safely execute a calibration sequence in a loaded state.
This advantage is inherent to the absolute architecture itself, whether the underlying sensing physics are optical, magnetic, inductive, or GMI.
Evaluating Sensing Physics for Harsh Environments
The selection of the underlying sensing physics dictates the sensor’s vulnerability to physical and electromagnetic stressors.
Optical Sensing
Optical encoders utilize a light source passing through a code disc to a photodetector.
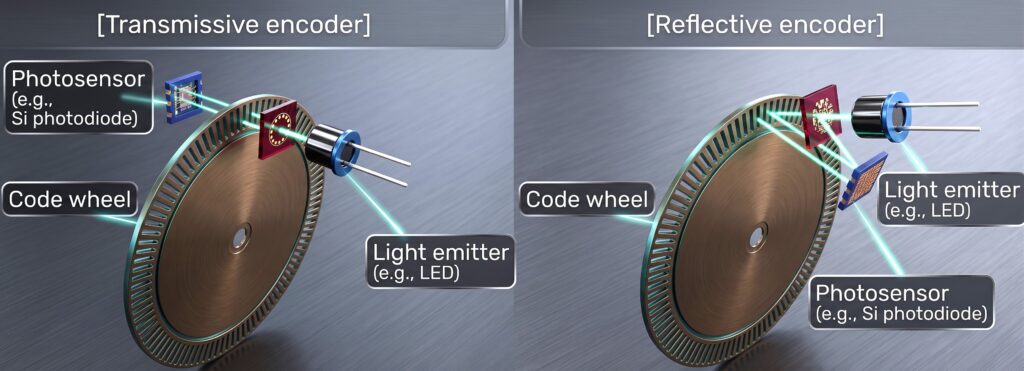
They provide unparalleled intrinsic accuracy and resolution. While older optical designs were highly susceptible to failure from single dust particles or condensation, modern optical encoders utilize phased-array photodetectors that average the signal over multiple slits, significantly improving resilience.
However, operating optical systems in heavy condensation or airborne debris still requires heavy mechanical sealing (IP65/IP67), which increases the overall footprint and mass, often a detriment in compact robotic joint designs.
Furthermore, extreme thermal cycles (-40°C to +85°C) can cause dimensional shifts in the disc or optics, leading to misreads if thermally stable materials are not utilized.
Secure Your Components Stock Now with Torquety
Reliable automation components for high-performance applications.
Magnetic Sensing (Hall-Effect)
Traditional magnetic encoders utilize Hall-effect sensors to detect the orientation of a magnetized rotor.
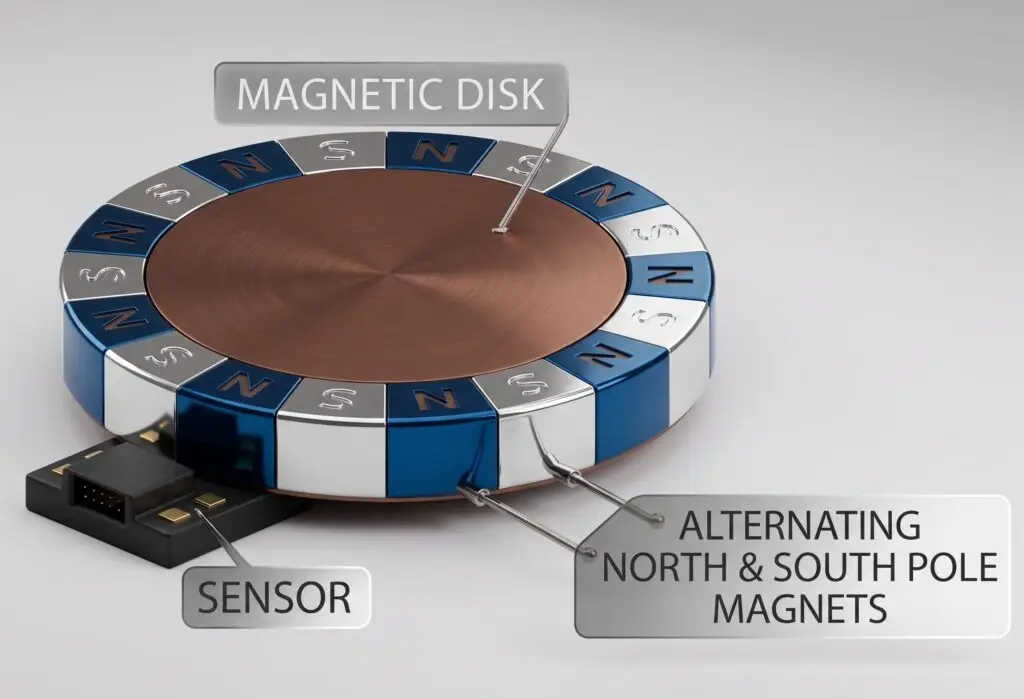
Because they do not rely on a line of sight, they are immune to non-magnetic dust, oil, and moisture, allowing the internal electronics to be fully encapsulated.
However, Hall-effect magnetic encoders have severe vulnerabilities in heavy industry:
- Ferromagnetic Contamination: They are highly susceptible to ferromagnetic debris (metal shavings, mining dust). Iron particles magnetically adhere to the rotor, altering the magnetic flux and permanently corrupting the position data.
- Magnetic Susceptibility: The Hall-effect sensing element itself is vulnerable to external magnetic fields generated by nearby high-current servo motors, frequency converters, and electromagnetic brakes, which induce errors directly at the sensing stage.
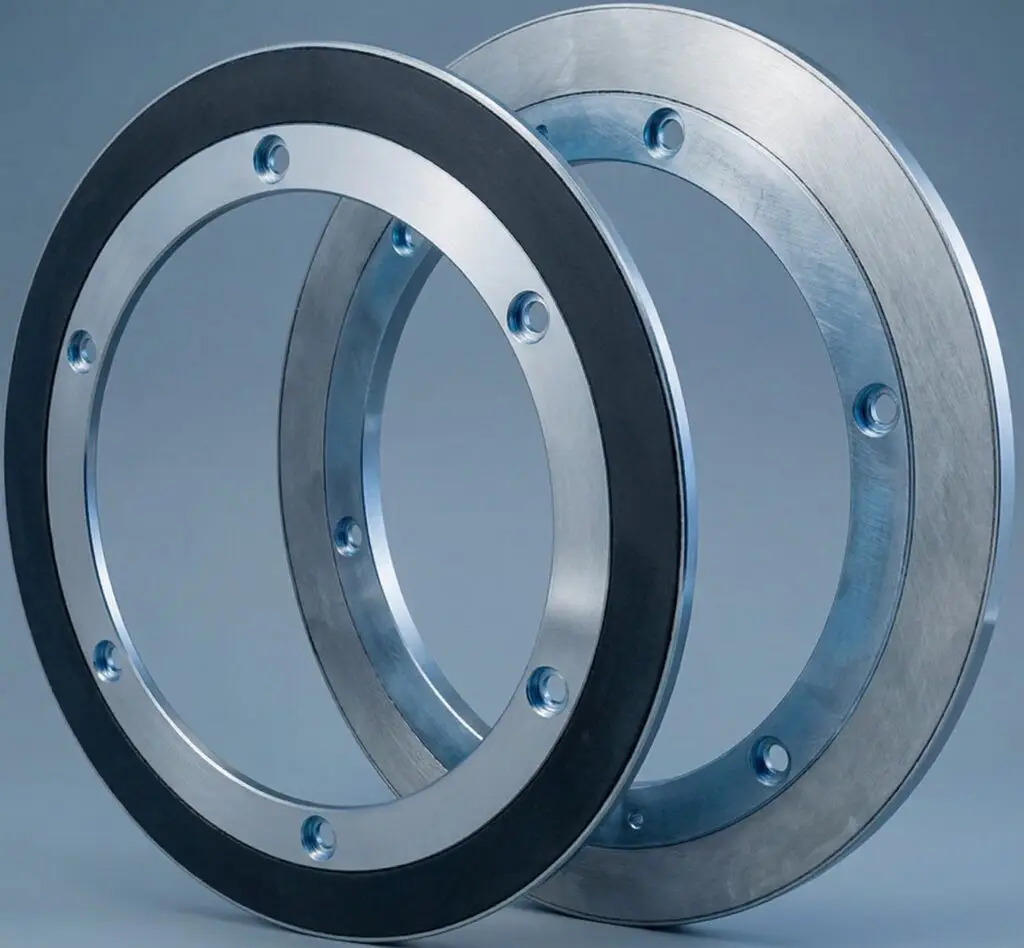
Inductive and Giant Magneto Impedance (GMI) Technologies
For extreme environments, Inductive and Giant Magneto Impedance (GMI) technologies solve the limitations of standard magnetic sensors.
- Inductive sensors scan the variable electrical a.c. impedance of a metallic target.
- GMI sensors utilize a thin metal foil where a magnetic field induces variable a.c. impedance regions.
Both technologies are inherently hysteresis-free, immune to standard electromagnetic interference, and unaffected by ferromagnetic dust, making them strictly superior to Hall-effect sensors in demanding industrial applications.
Mechanical Stress: Resolution vs. Effective Number of Bits (ENOB)
Heavy machinery and continuous tracked vehicles generate high-frequency mechanical resonance.
This vibration induces radial or axial play (eccentricity) in the encoder shaft.
Specifying an encoder solely based on a high raw resolution (e.g., 19-bit or 22-bit) is a critical engineering oversight if the environment includes heavy vibration.
If the rotor shifts off-center due to shock loads, a standard “one-point” scanning sensor will output a sinusoidal eccentricity error. Under these conditions, the Effective Number of Bits (ENOB) drops significantly; the least significant bits (LSB) become pure noise.
To maintain positioning accuracy under shock (e.g., 50g) and vibration (e.g., 20g), the encoder must utilize a holistic 360° scanning principle.
Technologies like modern Inductive and GMI encoders scan the entire circumference of the rotor simultaneously. This geometry inherently averages out both static and dynamic eccentricity errors caused by vibration and mechanical fatigue, preserving the ENOB and true accuracy of the system.
Signal Integrity and Electromagnetic Interference (EMI)
Electromagnetic interference must be mitigated at two separate stages: the sensor level and the transmission level.
- Sensor Level: As noted, the sensing element must be immune to ambient magnetic fields (favoring Inductive/GMI over Hall-effect).
- Transmission Level: Heavy industry environments feature aggressive electrical noise that couples into cabling. To prevent signal corruption between the encoder and the motion controller, robust differential digital communication protocols (such as BiSS-C or SSI) must be utilized. These protocols reject common-mode noise on the line, ensuring that the processed high-resolution data reaches the controller intact.
Supply Chain Considerations
Standard global lead times of twelve to sixteen weeks for high-performance components generate unacceptable downtime for production lines or rapid prototyping cycles.
Distributors operating localized precision inventories (such as Torquety in the UK) bypass global freight delays, providing immediate availability for aerospace-grade and heavy-industrial motion control components.
Explore these additional resources for more details: Design Guidelines for Encoder Interface Cables: Specifications and Common Errors, Sensor Alignment for Small-Diameter Rotary Encoder Scales: Tolerance and Mounting Guidance, and Safe Torque Off (STO) in Servo Drives: Architecture, Ratings, and System Design Trends.
Source Your Encoder from Torquety — Official UK Distributor
Torquety distributes and supplies Rotary Encoders from our London headquarters, providing engineers across the UK with fast access to verified, in-stock components. We stock Encoder units ready for next-day dispatch from UK stock — no long international lead times. Whether you need one unit or a volume order, Torquety delivers the exact specification your application demands.
Source Your Encoder from Torquety — Official UK Distributor
Torquety distributes and supplies Rotary Encoders from our London headquarters, providing engineers across the UK with fast access to verified, in-stock components. We stock Encoder units ready for next-day dispatch from UK stock — no long international lead times. Whether you need one unit or a volume order, Torquety delivers the exact specification your application demands.
Need a Custom Component Solution?
Contact our engineering team to discuss your application requirements and get a custom quote.