Torque motors (also called direct drive motors or pancake motors) are designed for applications where gear reduction is undesirable: the backlash, compliance, and friction of a gearbox limit bandwidth and accuracy at the output.
Torque motors mount directly to the load axis, producing high torque at low speed through a large number of magnetic pole pairs. This pole count amplifies the requirement for encoder resolution: a motor with 50 pole pairs requires 50× more encoder counts per revolution than a 2-pole motor to achieve the same commutation quality.
What a Direct Drive Torque Motor Is?
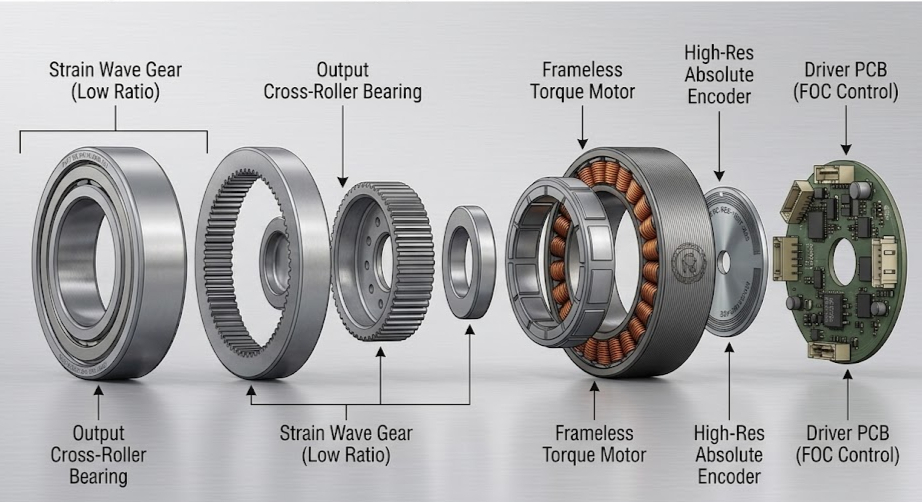
A torque motor is a frameless brushless DC motor, the motor consists of two elements:
- Rotor (inner component): Permanent magnet ring that mounts to the rotating shaft or is integrated into the rotating structure.
- Stator (outer component): Wound coil assembly that mounts to the housing or structure.
No bearings are part of the motor itself; the host machine’s bearings support the load and maintain the air gap between rotor and stator. No motor shaft, no encoder coupling, no gearbox.
Typical torque motor parameters:
| Parameter | Range |
|---|---|
| Outer diameter | 100 mm to 2,000 mm |
| Pole pairs | 8 to 100+ |
| Peak torque | 10 Nm to 100,000 Nm |
| Speed range | 0 to 500 rpm |
| Application | Rotary table, robot joint, semiconductor wafer handler, telescope mount |
The Pole Pair × Encoder Resolution Relationship
In a brushless motor, the drive must commutate the phase currents in synchrony with the rotor position. For a motor with P pole pairs, one complete electrical cycle of commutation corresponds to 360° / P of mechanical rotation.
Commutation resolution requirement:
To achieve smooth, low-ripple commutation, the encoder must provide at least 100–1,000 counts per electrical cycle. For a motor with 50 pole pairs:
Secure Your Components Stock Now with Torquety
Reliable automation components for high-performance applications.
- 1 electrical cycle = 360° / 50 = 7.2° mechanical.
- Encoder counts needed per electrical cycle: 100–1,000.
- Total encoder counts needed per revolution: 100–1,000 × 50 = 5,000–50,000 counts/rev.
- In bits: 5,000 counts = 13 bits; 50,000 counts = 16 bits (minimum).
For ideal commutation (smooth torque ripple < 1%): 4,000+ counts per electrical cycle. At 50 pole pairs: 200,000+ counts/rev = 18 bits minimum.
Accuracy requirement adds to resolution:
The application may also require high angular accuracy — for example, a semiconductor wafer handling robot requiring ±0.001° axis accuracy. With 50 pole pairs, and ±0.001° required:
- Required encoder accuracy: ±0.001°.
- Available technologies at this accuracy: interferential optical (±0.00056°) or high-end capacitive (±0.001°).
For a 200 mm diameter torque motor on a semiconductor wafer handling axis, a high-accuracy absolute encoder with 22–26 bit resolution and ±0.001° accuracy is the correct specification.
Absolute vs. Incremental Encoder for Torque Motor Commutation.
Torque motors can use either incremental or absolute encoders for commutation, but the tradeoffs differ significantly.
Incremental Encoder Commutation
An incremental encoder provides commutation data through phase alignment at initialization. During power-up:
- The drive applies a known current pattern to the motor phases.
- The motor snaps to the equilibrium position for that phase pattern.
- The drive reads the current encoder position and uses it as the commutation reference.
- The encoder’s ABZ output tracks relative position changes from this reference during operation.
Problems:
- The initialization snap causes a brief uncontrolled motion, problematic for sensitive loads (wafer handlers, precision optical mounts).
- If the encoder loses count (power interruption, count error), commutation fails.
- Absolute homing is required for axis position after initialization.
Absolute Encoder Commutation
Absolute encoder provides commutation data immediately at power-up:
- Drive reads the absolute position from the encoder (via BiSS-C or SSI).
- Position is decomposed into full revolutions and partial revolution within the 360°/P electrical cycle.
- Drive immediately applies the correct current vector for that mechanical position.
- No snap, no initialization motion, no uncertainty.
For precision and sensitive load applications, absolute encoder commutation is the required approach. The absolute encoder must provide sufficient resolution for accurate commutation and accurate position feedback simultaneously, which drives the specification toward 22–26 bit encoders.
Frame-Less Encoder Integration for Torque Motors
Since the torque motor is itself frameless, the encoder must also be frameless, mounted directly to the rotating elements without an independent encoder housing:
- Encoder scale (rotor): A ring-shaped disc bonded to the motor rotor surface or to the rotating hub.
- Encoder readhead (stator): Mounted to the stationary motor stator or to the housing.
For large-diameter torque motors (200–2,000 mm OD), multiple readheads at 120° or 180° spacing:
- Average out eccentricity errors (180° spacing: first-harmonic eccentricity cancelled).
- Provide redundancy: if one readhead fails, the others continue operating.
The encoder’s inner bore must accommodate the torque motor rotor bore, for through-bore designs (common in robots and rotary tables), both the motor and encoder have a hollow center that allows cable and pneumatic pass-through.
Temperature Considerations
Torque motors generate significant heat in the stator winding during high-duty-cycle operation. The encoder, mounted on the stator body, is exposed to elevated temperatures:
- Stator surface temperature may reach 80–120°C at maximum duty cycle.
- Encoder must be rated for the stator surface temperature.
- Thermally stable encoder technologies are preferred: optical glass scale (stable to 80–100°C) or capacitive designs with high-temperature rating (Electric Encoder series: rated to +125°C).
Explore these additional resources for more details: Hybrid Slip Ring Assemblies for Defense: Architecture and Transmission Requirements, Servo Drive Grounding: Earth Ground, Chassis Ground, and Signal Ground Explained, and Industrial Slip Ring Selection Guide: Key Parameters and Application Mapping.
Need a Custom Component Solution?
Contact our engineering team to discuss your application requirements and get a custom quote.